|
|
 |
|
|
|
|
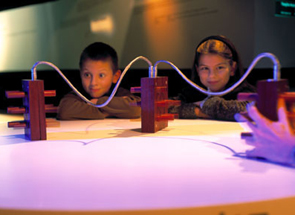
Pegblocks
Pegblocks are networked tactile transducers. As users manipulate the array of pegs, sliding them back and forth, motion is converted to electricity and converted back into motion through out the rest of the network. The resulting movements of the pegs is not determined by any one individual input but by the networked group as a whole.
Each peg is coupled to an electric dynamo/motor. The dynamo/motor can act in two modes: it can generate electricity from motion and convert electricity inton motion. As the peg is moved back and forth electric energy is generated and converted back into motion through out the rest of the network. Pegblocks extend the notion of Distributed Shared Physical Objects of inTouch to explore re-configurable, haptic communication network, integrating representations using peg patterns that were impossible in "inTouch". They allow simultaneous touch of multiple human hands to be extended over space, as well as asynchronous exchange of peg patterns.
Pegblocks is based on an early prototype developed by Ben Piper as a class project in a Physics and Media class taught by Prof. Neil Gershenfeld, MIT Media Lab, in the fall of 1999. This original prototype was built out of Lego bricks and was intended as a means of two way haptic communication
Signature: Konzept, Realisation & Programmierung: Ben Piper, Matthew Karau, Beto Peliks, and Professor Hiroshi Ishii
Source: PILO
Cross-reference: The right to reprint is reserved for the press; no royalties will be due only with proper copyright attribution.
 download
printversion download
printversion
back
|
|
|