
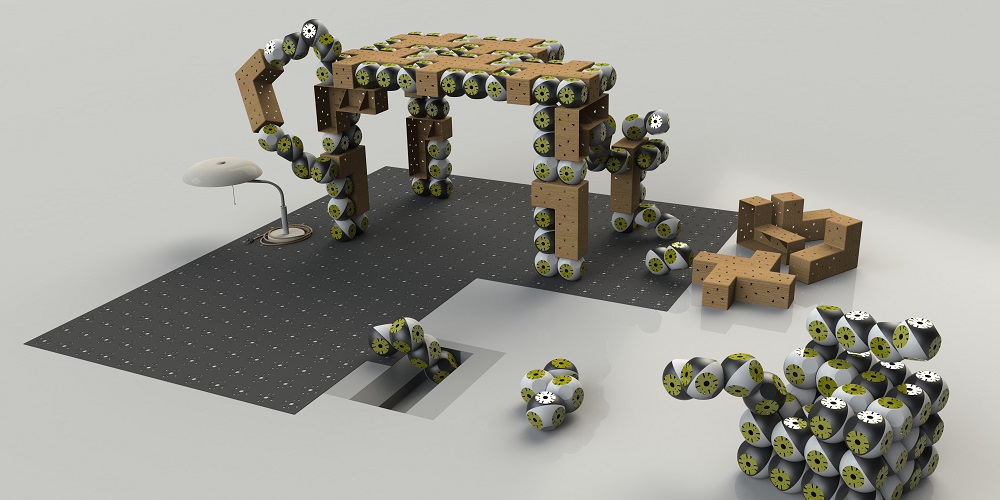
This project explores the design and control of modular robots, called Roombots, to be used as building blocks for furniture that moves, self-assembles, and self-reconfigures. Modular robots are made of multiple simple robotic modules that can attach and detach. Connectors between units allow the creation of arbitrary and changing structures depending on the task to be solved. They offer higher versatility and robustness, as well as the possibility of self-reconfiguration. The type of scenario that we envision is a group of Roombots that autonomously connect to each other to form different types of furniture, e.g. stools, chairs, sofas and tables, depending on user requirements. This furniture will change shape over time as well as using actuated joints to move to different locations depending on the users needs. When not needed, the group of modules can create a static structure such as a wall or a box.
