
F.o.G.—Face on Globe is a concept used to study interactions between humans and artifacts. Most interactive robots are designed to have human likeness in order to make their interactions with people more natural.
F.o.G.—Face on Globe is a concept used to study interactions between humans and artifacts. Most interactive robots are designed to have human likeness in order to make their interactions with people more natural.

Deltu is a delta robot with a strong personality that interacts with humans through two iPads. Depending on its mood it plays with the recipients.
Since the first industrial revolution, automation has been one of the primary instruments of increasing productivity, that is replacing human workforce with task-performing machines. The thermo-mechanical models of the early industrial age have now evolved by into more complex electro-computational networks, where scripted interactions are staking out an ever-growing number of domains and specialist fields.

The Wandering Artist is a meditation that took place at the European Space Agency on the role that creativity and human expression play in the context of space exploration.
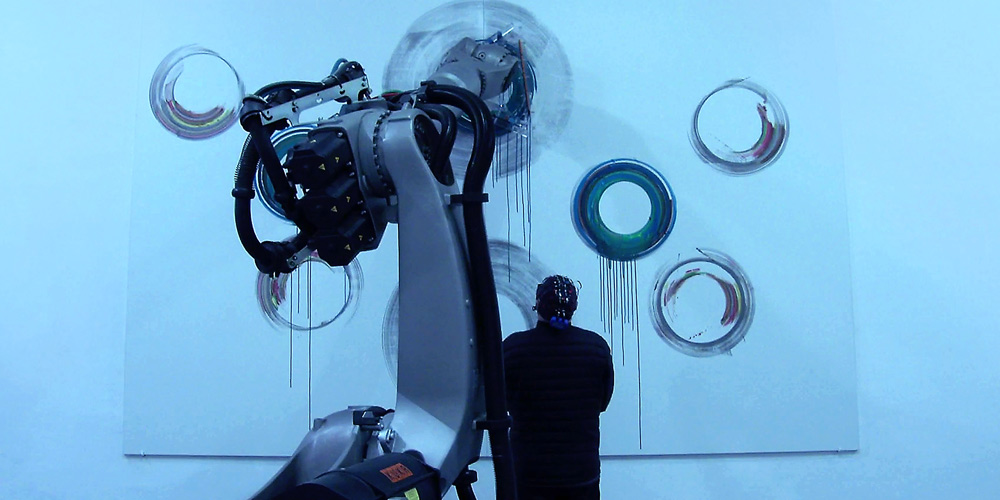
A3 K3 is a unique interactive experience. Artworks are created by machine technology and audience participation. Dragan Ilić uses an elaborate brain-computer interface (BCI) system where he controls a hi-tech robot with his brain via state-of-the-art technology.

After the groundbreaking exhibition of Rock Print at the first Chicago Architecture Biennial 2015 “Rock Print: a Manistone” demonstrates the significant advances of the ongoing research in jammed architectural structures at ETH Zurich.

Mimus is a giant industrial robot that’s curious about the world around her. Unlike in traditional industrial robots, Mimus has no pre-planned movements–she is programmed with the autonomy to roam about her enclosure.
Experience Workshop devotes its full program to children’s views on the robotification of society. Participating children can design, build and program the robot they need the most. By the end of the day we might have robots that go to school, do the homework and pass the exams.
Through the use of a smartphone camera’s object & color recognition capabilities, this app can automatically register the composition of a Rubik’s Cube.

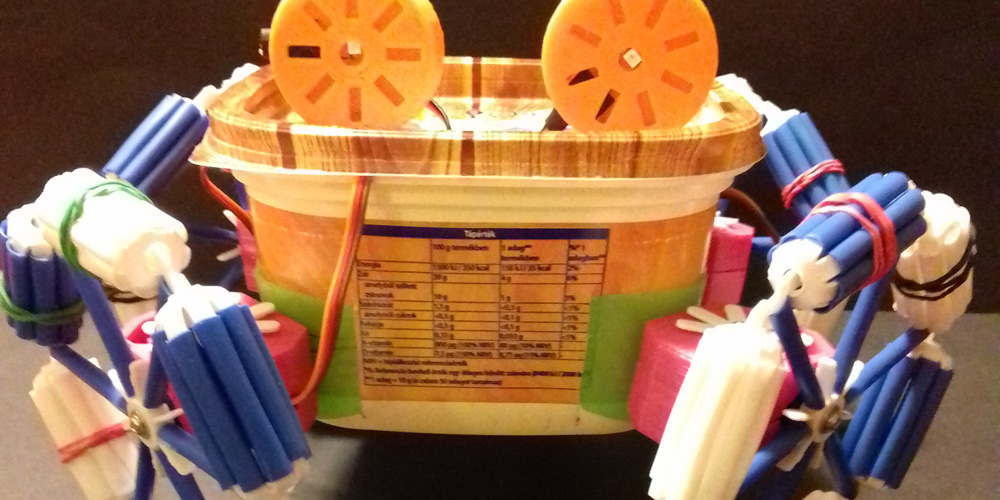
The Hexapod is a spider-like robot. Its research objective is to demonstrate the trainability of biomechanical processes in neuronal networks. Thanks to object recognition capabilities, the robot can navigate independently in it field of deployment and execute tasks.

All Rights Reserved, 2017. Data Protection / Impressum/Copyright